Carter Ung
Incoming CS PhD at Johns Hopkins · Embodied AI & Robotics at Ai2
I am an incoming CS PhD student at The Johns Hopkins University, advised by Homanga Bharadhwaj (Research Scientist, Meta Reality Labs) and Greg Hager (Director, NSF CISE and Amazon Robotics). I am currently at the Allen Institute for AI (Ai2) with the Robotics team and am jointly advised at the University of Washington under Dieter Fox (Founding Director, Seattle NVIDIA Robotics Lab) and Siddhartha Srinivasa (Founding Director, Amazon Robotics AI) in the Robotics and State Estimation Lab and Personal Robotics Lab. I am grateful to have my graduate research supported by the NSF CISE Graduate Fellowship.
Previously, I studied Computer Science and Biomedical Engineering at the University of Houston, where I spent over two years with Dr. Shishir Shah on pose-invariant face recognition (VISAPP 2025). I also worked as a software engineer at Microsoft, building Copilot into OneNote.
My research is at the intersection of robotics and artificial intelligence, where today’s policies fail to generalize and dexterous manipulation in human environments remains an open frontier. I build full-stack robotic systems—drawing on machine learning, kinematics and dynamics, and cognitive science—toward anthropomorphic intelligence that perceives, reasons, and acts under physical and social constraints in reactive human environments.
Concretely, my work spans scalable evaluation and representation of manipulation behaviors, human-grounded multimodal perception for action policies and world models, and sim-to-real transfer for dexterous manipulation.
I’ve come across many kind people in my curious journey toward academia and industry. I am always open to chat and talk about perspectives in research, career, and life aspirations. Reach me at cung1 [at] johnshopkins [dot] edu.
Advisors
 Homanga Bharadhwaj Research Scientist, Meta Reality Labs
Homanga Bharadhwaj Research Scientist, Meta Reality Labs  Greg Hager Director, NSF CISE & Amazon Robotics
Greg Hager Director, NSF CISE & Amazon Robotics  Dieter Fox Founding Director, Seattle NVIDIA Robotics Lab
Dieter Fox Founding Director, Seattle NVIDIA Robotics Lab  Siddhartha Srinivasa Founding Director, Amazon Robotics AI
Siddhartha Srinivasa Founding Director, Amazon Robotics AI  Shishir Shah Chief AI Officer, University of Oklahoma
Shishir Shah Chief AI Officer, University of Oklahoma Mentors
 Yi Ru (Helen) Wang PhD Student, University of Washington
Yi Ru (Helen) Wang PhD Student, University of Washington  Vuong (Dustin) Nguyen Senior AI Research Scientist, AutoDesk AI
Vuong (Dustin) Nguyen Senior AI Research Scientist, AutoDesk AI News
- Apr 2026 We release RoboPlayground and partner with the BitRobot Network to unveil TeleArms!
- Jan 2026 RoboEval accepted to IEEE International Conference on Robotics and Automation (ICRA) 2026!
- Aug 2025 Selected as a 2025 National Science Foundation Computer and Information Science and Engineering Graduate Fellow!
Publications
| RoboPlayground: Democratizing Robotic Evaluation through Structured Physical Domains | |
 | RoboEval: Where Robotic Manipulation Meets Structured and Scalable Evaluation ICRA 2026 Eval&Deploy Workshop at CoRL 2025 (Oral Spotlight) Bimanual Manipulation: Advancing Human-Humanoid Interaction and Collaboration Workshop at IROS 2025 RoboEval introduces a unified evaluation suite covering bimanual manipulation tasks with fine-grained metrics so researchers can compare models beyond binary success/failure. |
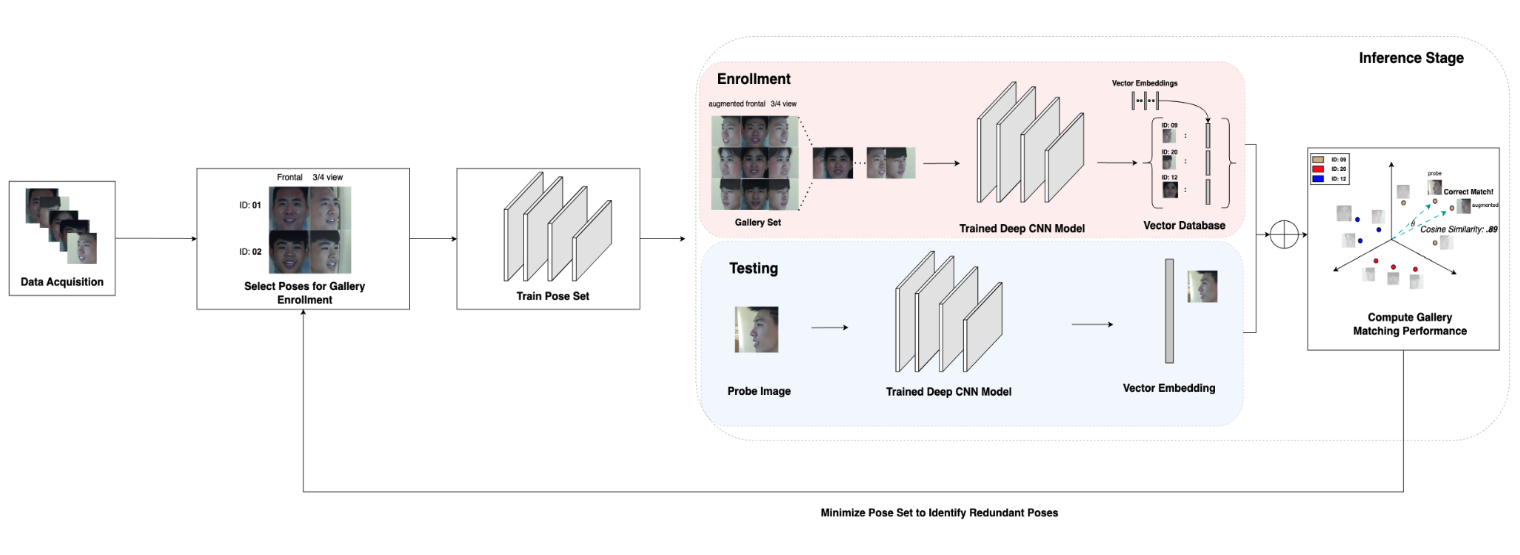 | Minimizing Number of Poses for Pose-Invariant Face Recognition We study how many viewpoint images are truly needed for robust, pose-invariant face recognition and show that a compact pose set dramatically reduces data-collection overhead. |
 | Monitoring of Tumor Evolution with Low-Field MRI Enhanced via Priors-Aware Deformation Modeling: The Paradigm of Low-grade Gliomas Watch-and-Wait Under Review We monitor longitudinal tumor evolution in low-field MRI through priors-aware deformation modeling, enabling an accessible watch-and-wait paradigm for Low-Grade Gliomas (LGG). |
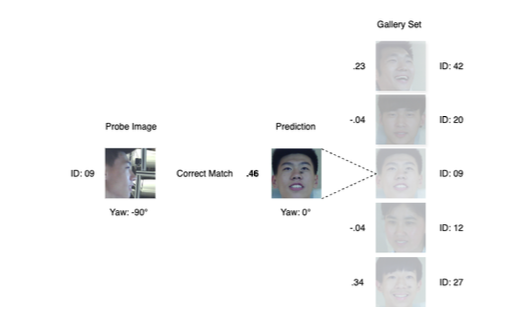 | Minimizing the Number of Poses for Pose-Invariant Face Recognition Undergraduate Dissertation, University of Houston 2024 My honors thesis extends the VISAPP study and details the full experimental pipeline for low-redundancy face-data acquisition. |